ĐỒ ÁN TỐT NGHIỆP Ô TÔ NGHIÊN CỨU TÍNH TOÁN ỔN ĐỊNH CỦA Ô TÔ KHI QUAY VÒNG

NỘI DUNG ĐỒ ÁN
BỘ CÔNG THƯƠNG
TRƯỜNG ĐẠI HỌC CÔNG NGHIỆP TPHCM
KHOA CÔNG NGHỆ ĐỘNG LỰC
LUẬN VĂN TỐT NGHIỆP
NGHIÊN CỨU TÍNH TOÁN ỔN ĐỊNH CỦA Ô TÔ KHI QUAY VÒNG
TRƯỜNG ĐHCN TP.HCM Cộng Hòa Xã Hội Chủ Nghĩa Việt Nam
KHOA CN ĐỘNG LỰC Độc Lập – Tự Do – Hạnh Phúc
NHIỆM VỤ LUẬN VĂN TỐT NGHIỆP
Sinh viên thực hiện:
MSSV:
MSSV:
Ngành: Công Nghệ Kỹ Thuật Ôtô Niên khóa:
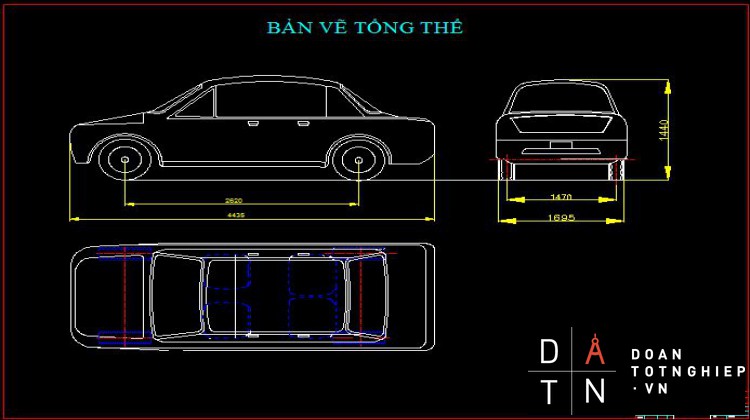
Tên đề tài: Nghiên cứu tính toán ổn định của ô tô khi quay vòng áp dụng trên xe Bus SAMCO-BG4W
1. Yêu cầu: - Xác định các yếu tố ảnh hưởng đến quá trình quay vòng của xe
- Dựa vào cơ sở lý luận đưa ra được các đại lượng đánh giá sự ổn định khi quay vòng
- Đánh giá mức độ ổn định khi quay vòng của xe qua các đại lượng
- Đề nghị các thông số mới để xe an toàn hơn
- Sử dụng phần mềm labview để mô phỏng đồ thị
2. Nội dung: - Chuyển động quay vòng của ô tô khi tính đến sự biến dạng của lốp xe
- Ảnh hưởng của kết cấu ô tô khi quay vòng
- Hàm truyền khi xe quay vòng
- Ảnh hưởng của gió bên khi quay vòng
- Tính toán các thông số cụ thể của xe Bus SAMCO – BG4W
- Đề xuất và tính toán tính ổn định tối ưu của ôtô
- Kết luận và kiến nghị.
MỞ ĐẦU
1.1/ Lí do chọn đề tài:
Xe buýt là một phần thiết yếu của cuộc sống hàng ngày và đóng một vai trò quan trọng trong cơ cấu xã hội ở nhiều nước nói chung và đặc biệt là Việt Nam ta nói riêng. Một nước phát triển vươn tầm thế giới thì không thể thiếu được hệ thống xe buýt, quản lí, dịch vụ chuyên nghiệp.
Xe buýt đã trở thành thói quen không thể thiếu trong đời sống của nhiều người dân, đặc biệt là cán bộ hưu trí và học sinh, sinh viên. Ước tính trung bình mỗi ngày xe buýt vận hành trên 10.000 lượt xe, vận chuyển được trên 1 triệu lượt hành khách, hạn chế trên 700.000 lượt xe máy tham gia giao thông trên đường phố. Vì vậy có thể giảm thiểu đươc tình trạng ách tắc giao thông ở nước ta, giảm thiểu các vụ tai nạn giao thông đáng tiếc xảy ra. Giảm thiểu được tình hình ô nhiễm môi trường đang ngày càng quá độ do sự tham gia của quá nhiều phương tiện giao thông. Có thể nói xe buýt là một phương tiện công cộng không thể thiếu trên bất cứ quốc gia nào.
Đứng trước nhu cầu quá lớn về xe buýt như hiện nay thì vấn đề an toàn và ổn định của những chiếc xe buýt phục vụ người dân hàng ngày phải được đảm bảo. Những vấn đề đó đã nhắc nhở những người có trách nhiệm phải luôn luôn đặt nặng lên vai mình vấn đề nghiên cứu để có thể nêu ra những vấn đề trong những chiếc xe buýt hiện hành và đặc biệt là dựa trên những vấn đề đó có thể đề xuất ra những phương án để khắc phục vấn đề một cách tối ưu nhất mà vẫn phù hợp với nền kinh tế của nước nhà.
Qua đó chúng tôi nhận thấy được là mình cần phải làm một điều gì đó để cống hiến cho nền công nhiệp nước nhà và dưới dây là nghiên cứu của chúng tôi về đề tài “ Nghiên cứu tính toán ổn định của ô tô khi vào quay vòng” và chúng tôi nghiên cứu cụ thể trên xe buýt SAM CO BG4w, một vấn đề rất thực tế của chúng ta hiện nay là vấn đề an toàn ,ổn định của xe buýt khi vào quay vòng. Qua việc nghiên cứu chúng tôi sẽ tìm hiểu và đưa ra được những vấn đề còn mắc phải của chiếc xe buýt này và những đề xuất để có thể làm cho những chiếc xe buýt này được an toàn và ổn định hơn khi vào quay vòng cũng như khi đi trên đường. Đó cũng chính là lí do chúng tôi chọn đề tài này để nghiên cứu và tính toán. Đề tài “ NGHIÊN CỨU TÍNH TOÁN ỔN ĐỊNH CỦA Ô TÔ KHI QUAY VÒNG” dưới sự hướng dẫn của thầy PGS-TS
1.2/ Mục tiêu và nhiệm vụ:
1.2.1/ Mục tiêu:
Vận dụng những kiến thức, lí thuyết về ổn định để nghiên cứu và tính toán sự ổn định đối với dòng xe buýt 50 chỗ ngồi SAMCO BG4w. Từ đó rút ra được những vấn đề hiện tại đối với nhứng chiếc xe buýt đã xuất xưởng và đang hoạt động trên đường, song song với những vấn đề đó là đề xuất ra những ý kiến để có thể đảm bảo được sự an toàn, ổn định của xe khi hoạt động trên đường đặc biệt là khi vào cua hay là khi có gió tác dụng vào. Khắc phục những vấn đề đó cho những chiếc xe sẽ xuất xưởng sau này.
1.2.2/ Nhiệm vụ:
Đưa ra được các yếu tố ảnh hưởng đến quá trình quay vòng của xe, trong những yếu tố đó phải đưa ra được cụ thể những vấn đề, từ đó đưa ra những điều khuyên nên làm đối với các xe hiện nay.
Nghiên cứu mô hình tình toán của xe để có được những phương trình động học, động lực học tạo nền tảng cho việc nghiên cứu các vấn đề trong đề tài.
Dựa trên những chỉ tiêu đánh giá về độ ổn định để đánh giá sự ổn định của xe đang xét nếu xe không đạt tiêu chuẩn lập tức phải có biện pháp khắc phục.
1.3/ Giới hạn của đề tài:
Việc khảo sát tính ổn định của xe trong thực tế là rất khó khăn do xe là một cơ hệ phức tạp gồm nhiều hệ thống, nhiều bộ phận cấu thành, mỗi hệ thống là một cơ hệ nhỏ đàn hồi nên có thể xem như xe được đặt trên một cơ hệ đàn hồi. Nên để dễ đàng hơn trong việc nghiên cứu ta sẽ nghiên cứu xe trên các mô hình hóa với hệ tọa độ là mặt đường
Để quá trình tính toán được đơn giản và thu gọn, ta sẽ đơn giản hóa đi các vấn đề không nhất thiết hoặc là những vấn đề thực tế không ảnh hưởng nhiều cho lắm, tuy nhiên sự đơn giản hóa vẫn nằm trong giới hạn cho phép.
1.4/ Phương pháp nghiên cứu:
Phân tích các yếu tố ảnh hưởng đến một chiếc xe khi vào quay vòng hay khi đi trên đường trong thực tế, bao gồm yếu tố chủ quan và yếu tố khác quan.
Phân tích các yếu tố động học của xe, các yếu tố động lực học tác động vào xe thông qua các mô hình tính toán đã được đơn giản hóa. Từ các phương trình động lực học làm nên tảng ta sẽ thiết lập các phương trình tính toán các thông số ảnh hưởng đến ổn định khi quay vòng của xe.
Sau khi thiết lập được các phương trình tính toán ta sẽ tính toán đối với các thông số cụ thể của xe ta đang xét. Sau đó sẽ so sánh với các chỉ tiêu đánh giá để kiểm nghiệm độ ổn định thông qua các thông số đó.
Nếu với các thông số kết cấu của xe không đạt được sự an toàn, ổn định ta phải đề xuất lại các thông số kết cấu mới, sau đó sẽ tính toán lại từ đầu các thông số ổn định với các thông số mới này.
1.5/ Bố Cục Luận Văn:
Bố cục luận văn gồm các chương sau:
Chương I: Chuyển động quay vòng của ô tô khi tính đến sự biến dạng của lốp xe
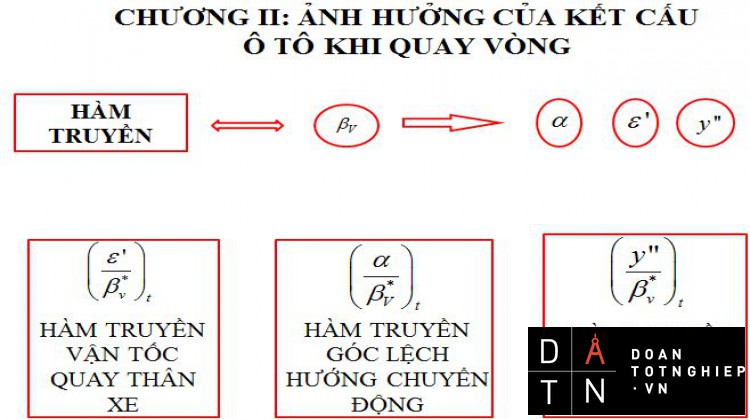
Chương II: Ảnh hưởng của kết cấu ô tô khi quay vòng
Chương III: Hàm truyền khi xe quay vòng
Chương IV: Ảnh hưởng của gió bên khi quay vòng
Chương V: Tính toán các thông số cụ thể của xe Bus SAMCO – BG4W
Chương VI: Đề xuất và tính toán tính ổn định tối ưu của ôtô
Chương VII: Kết luận và kiến nghị.
Phụ lục
LỜI CẢM ƠN
Đứng trước nhu cầu đang ngày càng lớn và thậm chí không thể thiếu đối với bất cứ quốc gia nào về việc sản xuất xe buýt cũng như việc sử dụng xe buýt. Thì vấn đề về an toàn của con người là vấn đề được đặt lên hàng đầu, xung quanh vấn đề về an toàn của con người khi tham gia đi xe buýt đã đặt ra cho các nhà nghiên cứu rất nhiều những đề tài. Đề tài của chúng tôi “ Nghiên cứu tính toán ổn định của ô tô khi quay vòng” cũng không nằm ngoài mục đích đó. Áp dụng những kiến thức về kết cấu ô tô, lí thuyết ô tô và những kiến thức thực tế chúng tôi đã nhiên cứu và dưới đây là bản thuyết minh trình bày những phân tích, lập luận và những vấn đề của chúng tôi về vấn đề ổn định của ô tô khi quay vòng. Chắc chắn trong quá trình trình bày các vấn đề thì không tránh khỏi sai xót kính mong bạn đọc có thể bỏ qua. Xin chân thành cảm ơn thầy giáo PGS-TS ........đã luôn hướng dẫn tận tình, cung cấp cho chúng tôi những tài liệu tham khảo cũng như những kiến thức còn thiếu xót để chúng tôi có thể hoàn thành tốt đề tài của mình.
MỤC LỤC
Chương I: Chuyển Động Quay Vòng Của Ôtô Khi Tính Đến Sự Biến Dạng Của Lốp Xe
1.1/ Qúa trình quay vòng của ô tô.......................................................................................... 1
1.2/ Sự quay vòng của ô tô khi không tính đến biến dạng lốp xe:
1.2.1/ Qúa trình quay vòng của ô tô......................................................................................... 2
1.2.2/ Các lực tác dụng vào ô tô khi quay vòng...................................................................... 4
1.3/ Sự quay vòng của ô tô khi tính đến sự biến dạng của lốp xe:
1.3.1/ Bán kính quay vòng tức thời.......................................................................................... 7
1.3.2/ Xét ảnh hưởng biến dạng của lốp xe:
1.3.2.1/ Trường hợp quay vòng thiếu > :........................................................................ 10
1.3.2.2/ Trường hợp quay vòng thừa < :......................................................................... 12
Chương II: Ảnh Hưởng Của Kết Cấu Ôtô Khi Quay Vòng
2.1/ Phương trình động học của xe khi quay vòng............................................................ 13
2.1.1/ Phương trình vận tốc .................................................................................................... 14
2.2.2/ Tọa độ trọng tâm của xe................................................................................................ 14
2.2.3/ Gia tốc hướng tâm của xe............................................................................................. 15
2.2/ Phương trình động lực học của xe khi quay vòng..................................................... 16
2.3/ Động lực học quay vòng................................................................................................. 18
2.4/ Động lực học quay vòng đều.......................................................................................... 25
Chương III: Hàm Truyền Khi Xe Quay Vòng
3.1/ Khái niệm.......................................................................................................................... 27
3.2/ Hàm truyền của vận tốc góc quay thân xe .Hiện tượng quay vòng thừa, quay vòng thiếu 28
3.2.1/ Ôtô quay vòng thiếu ( K > 0 )...................................................................................... 28
3.2.2/ Ôtô quay vòng thừa ( K < 0 )........................................................................................ 29
3.2.3/ Ôtô quay vòng đúng ( K = 0 )....................................................................................... 30
3.3/ Hàm truyền góc lệch bên của trọng tâm ôtô.............................................................. 33
3.3.1/ Ôtô quay vòng thiếu ( K > 0 )...................................................................................... 33
3.3.2/ Ôtô quay vòng thừa (K < 0 )......................................................................................... 34
3.3.3/ Ôtô quay vòng đúng ( K = 0 )....................................................................................... 34
3.4/ Hàm truyền gia tốc bên.................................................................................................. 36
3.4.1/ Ôtô quay vòng thiếu ( K > 0 )...................................................................................... 36
3.4.2/ Ôtô quay vòng thừa ( K<0 ).......................................................................................... 37
3.4.3/ Ôtô quay vòng đúng ( K = 0 )....................................................................................... 38
3.5/ Hàm truyền momen quay vành lái .............................................................................. 38
3.6/ Góc quay vành lái ........................................................................................................... 39
3.7/ Góc lệch hướng chuyển động ........................................................................................ 43
Chương IV: Ảnh Hưởng Của Gió Bên Khi Quay Vòng
4.1/ Mô tả sự ảnh hưởng của gió khi quay vòng................................................................ 46
4.2/ Sự nhạy cảm của ô tô khi có gió bên............................................................................ 47
4.2.1/ Góc bù quay vành lái.................................................................................................... 48
4.2.2/ Sự nhạy cảm của ô tô khi có gió bên N....................................................................... 50
Chương V : Tính Toán Các Thông Số Của Xe Bus SAMCO – BG4W
5.1/ Thông số kỹ thuật của xe Samco-BG4W.................................................................... 52
5.2/ Tính toán các thông số đặc tính quay vòng của xe :
5.2.1/ Hệ số kết cấu ôtô K ( s2/m ).......................................................................................... 55
5.2.2/ Tốc độ đặc trưng vng ( m/s )......................................................................................... 55
5.2.3/ Góc lệch hướng chuyển động ( rad )....................................................................... 55
5.2.4/ Góc quay bánh xe dẫn hướng ................................................................................. 56
5.2.5/ Góc quay của đòn quay trụ đứng .......................................................................... 56
5.2.6/ Góc quay của vành lái ............................................................................................. 56
5.2.7/ Tốc độ góc quay thân xe ......................................................................................... 56
5.2.8/ Gia tốc hướng tâm .................................................................................................... 56
5.2.9/ Momen góc quay vành lái Mv ..................................................................................... 57
5.3/ Xây dựng đường đặc tính tốc độ của các hàm truyền :
5.3.1/ Hàm truyền tốc độ góc quay thân xe ......................................................................... 57
5.3.2/ Hàm truyền góc lệch hướng chuyển động.................................................................. 59
5.3.3/ Hàm truyền gia tốc hướng tâm.................................................................................... 60
5.3.4/ Hàm truyền momen quay vành lái.............................................................................. 61
5.3.5/ Ảnh hưởng của lực gió:
5.3.5.1/ Gía trị của lực gió bên N tác dụng vào xe là........................................................... 63
5.3.5.2/ Khoảng cách tâm áp lực gió bên đền trọng tâm xe ............................................ 63
5.3.5.3/ Mômen của lực gió bên gây ra đối với điểm O là.................................................. 63
5.3.5.4/ Góc bù quay vành lái................................................................................................. 63
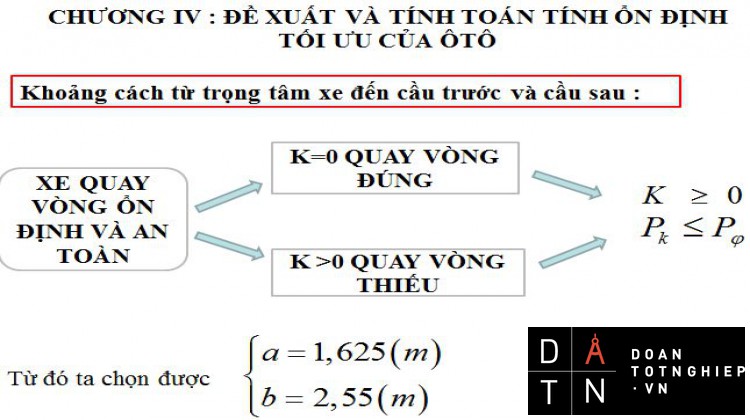
Chương VI : Đề Xuất Và Tính Toán Tính Ổn Định Tối Ưu Của Ôtô
6.1/ Khoảng cách từ trọng tâm xe đến cầu trước và cầu sau......................................... 65
6.2/ Tính toán các thông số đặc tính quay vòng của xe :
6.2.1/ Hệ số kết cấu ôtô K ( s2/m ).......................................................................................... 66
6.2.2/ Tốc độ đặc trưng ( m/s ).......................................................................................... 67
6.2.3/ Góc lệch hướng chuyển động ( rad )....................................................................... 67
6.2.4/ Góc quay bánh xe dẫn hướng ....................................................................... 67
6.2.5/ Góc quay của đòn quay trụ đứng ( rad )............................................................... 67
6.2.6/ Góc quay của vành lái .................................................................................. 68
6.2.7/ Tốc độ góc quay thân xe ............................................................................... 68
6.2.8/ Gia tốc hướng tâm ........................................................................................ 68
6.2.9/ Momen góc quay vành lái Mv...................................................................................... 68
6.3/ Xây dựng đường đặc tính tốc độ của các hàm truyền :
6.3.1/ Hàm truyền tốc độ góc quay thân xe ......................................................................... 69
6.3.2/ Hàm truyền góc lệch hướng chuyển động.................................................................. 71
6.3.3/ Hàm truyền gia tốc hướng tâm..................................................................................... 72
6.3.4/ Hàm truyền momen quay vành lái ............................................................................. 73
6.3.5/ Ảnh hưởng của lực gió bên:
6.3.5.1/ Gía trị của lực gió bên N tác dụng vào xe là........................................................... 75
6.3.5.2/ Khoảng cách tâm áp lực gió bên đến trọng tâm xe ............................................ 75
6.3.5.3/ Mômen của lực gió bên gây ra đối với điểm O là.................................................. 75
6.3.5.4/ Góc bù quay vành lái................................................................................................. 75
Chương VII: Kết Luận Và Kiến Nghị
7.1/ Kết luận.............................................................................................................................. 77
7.2/ Kiến nghị............................................................................................................................ 77
Phụ Lục...................................................................................................................................... 79
Tài Liệu Tham Khảo............................................................................................................... 97
PHỤ LỤC
HƯỚNG DẪN SỬ DỤNG PHẦN MỀM LABVIEW TRONG VIỆC VẼ ĐỒ THỊ
- Khởi động chương trình:
Double click chuột vào biểu tượng của chương trình ta được màn hình bên dưới.
Hình 1: Khởi động chương trình
Sau khi được màn hình khởi động như trên, ta chú ý các khung in đậm màu đỏ đó sẽ là nơi mà chúng ta tiếp tục click vào đó để tiếp tục những bước tiếp theo.
-Tiến trình làm việc:
Tiếp theo ta click chuột vào nơi có khung màu đỏ “ Blank VI”. Ta sẽ được hai màn hình như bên dưới. Đó sẽ là hai màn hình ta làm việc tại đó nó bAo gồm:
+ Màn hình thứ nhất có tên là Front Panel: Ở màn hình này sẽ là nơi chưa các thông số điều khiển ( thông số đầu vào) tức là nếu ta thay đổi các thông số này thì coi như biến số của hàm ta đang vẽ sẽ thay đổi dẫn tới kết quả sẽ thay đổi, và là nơi chứa biểu đồ thể hiện biểu đồ ta muốn vẽ.
+ Màn hình thứ hai có tên là Block Diagram: Màn hình này dùng để thể hiện mối liên hệ của các biến số, các hằng số trong một hàm như thế nào? Là nơi ta sẽ thể hiện hàm số muốn vẽ biểu đồ thông qua cách nối dây giống mạch điện thay vì phải viết các loại ngôn ngữ để thể hiện các mối liên hệ giống như các phần mềm khác.
Ta tiến hành kéo thả màn hình để được màn hình thích hợp cho ta làm việc như hình bên dưới
Hình 2: Màn hình nơi làm việc
Hình 3: Màn hình làm việc
-Tạo hàm muốn vẽ biểu đồ:
Để có thể vẽ được biểu đồ với hàm đã có sẵn ta phải thiết lập hàm trong labview. Ở cửa sổ Block Diagram ta click chuột phải lên bất kì chỗ nào trong vùng làm việc ta được màn hình như bên dưới.
Click chuột phải Arithmetic& Comparison Formula
Hình 4: Tạo hàm muốn vẽ biểu đồ
Sau đó ta dùng những kí tự, các công thức toán học để biểu thị hàm số mà ta đang muốn vẽ đồ thị. Như bên dưới. Kết thúc việc tao hàm ta click OK. Như vậy là ta đã thiết lập xong hàm cần vẽ biểu đồ.
Hình 5: Nhập hàm cần vẽ đồ thị.
- Thiết lập vòng lặp:
Với mục đích để đồ thị có thể biểu hiện một cách liên tục theo thời gian, có chu kì lặp lại do chính ta xác lập. Ta phải tiến hành xác lập cho hàm tính toán của chúng ta một vòng lặp. Cách làm như như hình bên dưới.
Cụ thể: Ta click chuột phải lên vùng làm việc ở cửa sổ Block Diagram Exec control While loop
Như vậy là ta được một khung vòng lặp có dạng hình chữ nhật, tiến hành kéo thả để được kích thước tùy ý.
Sau khi thiết lập vòng lặp, ở cửa sổ Block Diagram ta đưa phần công thức hàm đã thiết lập ở bước trước vào trong vòng lặp bằng cách quét chọn và kéo thả vào trong vòng lặp.
Bắt đầu từ đây khi đã thiết lập được vòng lặp, mọi thứ thiết lập tiếp theo ta sẽ làm việc trong vòng lặp này. Nếu thiêt lập bên ngoài vòng lặp ta có thể quét chọn nó và kéo vào trong vòng lặp.
Hình 6: Thiết lập vòng lặp
Hình 7: Đưa tất cả vào vòng lặp
-Thiết lập thông số đầu vào cho hàm số:
Như ta đã biết ở công thức hàm ta đã thiết lập ở bước trước thì cần có thông số đầu vào và thông số đầu ra. Thông số đầu vào ở đây chính là biến số thay đổi liên tục cụ thể như hàm ta thiết lập cho xe đang tính toán là thông số vận tốc của xe. Thông số đầu ra ở đây chính là sự biểu thị ở đồ thị.
Đối với phần mềm labview thì thông số đầu vào của một hàm số bất kì luôn chạy từ (). Nhưng đối với lĩnh vực ta đang xét là ôtô, cụ thể hơn thông số đầu vào của ta ở đây chính là vận tốc của xe như vậy vận tốc xe sẽ nhỏ nhất là 0 còn giá trị vận tốc lớn nhất tùy ta xác lập cho phần mềm chạy. Ta thiết lập như sau:
Mục tiêu của ta là đi xác lập giá trị lớn nhất và giá trị nhỏ nhất của thông số đầu vào, dĩ nhiên là ta có thể thay đổi giá trị này tùy thích.
Đầu tiên ta thiết lập giá trị lớn nhất:
Hình 8: Thiết giá trị lớn nhất của thông số đầu vào
Ở cửa sổ Block Diagram ta right click Arith & ComparisonComparisonGreater ? ta sẽ được một biểu tượng hình tam giác như hình bên dưới.
Hình 9: Thiết lập giá trị lớn nhất
Thiết lập giá trị nhỏ nhất:
Ở cửa sổ Block Diagram ta right click Arith & Comparison NumericSubtract ? ta sẽ được một biểu tượng hình tam giác như hình bên dưới.
Hình 10: Thiết lập giá trị nhỏ nhất
Vậy ta được 2 biểu tượng giá trị lớn nhất và giá trị nhỏ nhất như hình bên dưới. Như ta đã nói ta đang đi xác lập giá trị biến số nhỏ nhất và lớn nhất cho hàm số. Nên tại hai biểu tượng này ta lần lượt Right Click Constant để xác lập giá trị cho hai biểu tượng này
Hình 11:Định giá trị thông số đầu vào.
Sau khi lấy được các biểu tượng ra. Vấn đề của ta là tiến hành thiết lập mối quan hệ giữa các biểu tượng đó để để định cho nó chính là thông số đầu vào. Nhìn vào hình bên dưới. Không như các phần mềm khác phải dùng ngôn ngữ viết ra để thiết lập mối quan hệ, đối với Labview ta chỉ cần dùng việc nối dây để biểu thị các mối liên hệ giữa các biểu tượng.
Như vậy ta đã thiết lập xong thông số đầu vào của hàm số, bây giờ nếu ta muốn cho hàm số này có biến chạy từ đâu đền đâu chỉ việc điền số vào các ô ngay tại biểu tượng đã tạo ra.
Ví dụ như xe bus ta đang xét thì điền khoảng từ 0 - 50m/s (0-180km/h). Như vậy khi trên đồ thị biến số sẽ chạy từ 0-50m/s sau đó sẽ lặp lại do việc ta đã thiết lập vòng lặp cho nó ngay từ đầu.
Hình 12: Thiết lập mối quan hệ giữa các biểu tượng và đưa thành
thông số đầu vào
-Thiết lập thông số đầu ra của hàm số:
Sau khi thiết lập được thông số đầu vào của hàm số, ta tiến hành thiết lập thông số đầu ra. Thông số đầu ra của hàm số chính là kết quả được biểu thị trên đồ thị. Như vậy ta phải lấy đồ thị ra để biểu diễn nó.
Tại cửa sổ Front Panel ta Right Click Graph IndicatorXY Graph, kết quả là ta có một biểu đồ dùng để biểu thị hàm số ta có thể dùng chuột kéo thả để có được hình dạng biểu đồ như mong muốn, bên cạnh đó ở cửa sổ Block Diagram có một biểu tượng của đồ thị. Ta quét lên biểu tượng này và kéo nó vào trong vòng lặp. Xắp xếp như thế nào đó để gọn nhất cho ta làm việc.
Hình 13: Lấy biểu đồ thể hiện giá trị hàm số
Hình 14: Biểu đồ biểu thị hàm số
Ta thiết lập mối quan hệ giữa hàm số và đồ thị bằng cách nối dây để biểu thị mối quan hệ ở cửa sổ Block Digram.
Ở cổng X Input là thông số đầu vào của đồ thị ta nối với thông số đầu vào của hàm số
Ở cổng Y Input là thông số đầu ra của đồ thị ta nối với thông số đầu ra của hàm số
Ở cổng XY Graph là cổng thể hiện đồ thị.
Ngoài ra trên biểu tượng đồ thị này ta còn thấy có hai cổng:
Cổng Reset có được khi ta Right Click trên biểu tượng của đồ thị CreateControl sẽ được một biểu tượng reset dùng để reset lại sự hiển thị của đồ thị.
Cổng Enable có được khi ta Right Click trên biểu tượng của đồ thị CreateControl sẽ được một biểu tượng Enable, biểu tượng này cho phép sự hoạt động của đồ thị nếu ở trạng thái Enable và nếu ở trạng thái Disable thì đồ thị sẽ không hoạt động.
Hình 15: Xác lập mối quan hệ giữa hàm số và đồ thị
-Kết quả:
Sau khi thiết lập hết tất cả, ta xác lập cho thông số đầu vào chạy từ 0-50 m/s như hình dưới. Sau đó cho chương trình chạy với việc click lên biểu tượng mũi tên trên thanh công cụ. Kết quả là chương trình sẽ chạy từ 0-50 m/s sau đó dừng lại và ta được đồ thị như hình dưới. Muốn cho chương trình chạy nhưng lặp lại ta tiếp tục click vào biểu tượng thứ hai trên thanh công cụ có 2 mũi tên xoay vào nhau.
Hình 16: Biểu thị đồ thị
Thời gian chờ:
Đối với phần mềm Labview mặc định là biến số đầu vào sẽ thay đổi mối giá trị cách nhau là 1 đơn vị ví dụ như: biến số đi từ 0-50m/s thì sẽ chạy 0,1,2,3,4,5…Ứng với mỗi biến số như vậy thì chương trình sẽ tính toán cho ta kết quả và hiện thị lên đồ thị.
Thời gian chờ ở đây chính là thời gian thay giữa 2 lần thay đổi các thông số đầu vào của hàm số. Nếu tốc độ thay các biến số này vào quá nhanh thì ta sẽ không thấy kịp sự hiển thị của đồ thị, ngược lại nếu thời gian chậm hơn ta sẽ nhìn sự hiển thị rõ hơn. Cụ thể như sau:
Ở cửa sổ Block Diagram ta Right Click ProgrammingTimingWait until next ms Multiple ta được biểu tượng như hình bên dưới. Tương tự ta cũng thiết lập thời gian chờ bằng cách Right click lên biểu tượng chọn Constant và điền thời gian chờ vào đó. Thông thường ta thiết lập từ 10ms ( đơn vị chương trình mặc định là miligiây)
Hình 17: Tạo biểu tượng thời gian chờ
Hình 18: Thiết lập thời gian chờ
Cuối cùng ta kết thúc việc thiết lập và được một chương trình hoàn chỉnh như bên dưới và kết quả là ta chỉ việc cho chương trình chạy.
Hình 19: Hoàn tất việc
CHƯƠNG I: CHUYỂN ĐỘNG QUAY VÒNG CỦA Ô TÔ KHI TÍNH ĐẾN SỰ BIẾN DẠNG CỦA LỐP XE
1.1/Qúa trình quay vòng của ô tô:
Hình 1-1 : Quá trình quay vòng của ô tô
Qúa trình quay vòng của ô tô được chia làm 3 giai đoạn:
GDI: là giai đoạn chuẩn bị vào đường quay vòng với R
GDII: là giai đoạn vào quay vòng với bán kính tức thời R = Const
GDIII: là giai đoạn ra khỏi đường quay vòng với R
1.2/ Sự quay vòng của ô tô khi không tính đến biến dạng lốp xe:
1.2.1/ Qúa trình quay vòng của ô tô:
Hình 1-2: Mô hình quay vòng của ô tô
m: chiều rộng vết bánh xe
l : khoảng cách giữa 2 cầu xe
R: bán kính quay vòng tức thời
O: tâm quay vòng tức thời
: góc quay của hệ thống lái
: góc quay của bánh xe dẫn hướng bên ngoài
: góc quay của bánh xe dẫn hướng bên trong
Xét mô hình trên ta có:
= ; = ; =
tg = R =
Trong thực tế khi xe vào góc cua thì tài xế đánh lái rất từ từ với góc quay hệ thống lái rất nhỏ ( nếu không sẽ cua ngặt và mất quĩ đạo chuyển động điều này rất nguy hiểm)
Nên bé tg R = [1-1]
Đây là công thức tính bán kính quay vòng tức thời của xe khi không tính đến sự biến dạng của lốp xe.
Xác định mối quan hệ của và ?
[1-2]
[1-3]
- = [1-4]
Nhìn vào biểu thức [1-4] ta thấy , về mặt lý thuyết khi vào cua thì góc quay của 2 bánh xe dẫn hướng luôn khác nhau, tức là . Nhưng thực tế sự chênh lệch này rất nhỏ nên ta có thể bỏ qua và xem như = . Vì vậy trong tính toán về sau ta xem như = .
1.2.2/ Các lực tác dụng vào ô tô khi quay vòng :
Khi xe vào quay vòng ta xét các lực tác dụng lên xe cụ thể là vào trọng tâm T của xe. Trọng tâm này cách cầu trước một đoạn là a, cách cầu sau một đoạn là b.
Tại tâm T khi quay vòng thì xuất hiện lực li tâm tác dụng lên xe, có phương chiều như hình vẽ. Phân tích thành 2 thành phần theo phương và ta được , . Trong đó lực là lực dọc trục xe có xu hướng làm xe đi tới ta không xét đến. Lực có xu hướng làm xe văng ra khỏi đường vì vậy ta xét lực .
Hình 1-3: Phân tích lực tác dụng khi quay vòng
Ta có : [1-5]
Trong đó : là gia tốc hướng tâm
là gia tốc pháp tuyến
là gia tốc tiếp tuyến
Phân tích Hình 1-3 ta được: [1-6]
Với là góc hợp bởi lực li tâm với phương ngang của xe
Gia tốc pháp tuyến [1-7]
Gia tốc tiếp tuyến [1-8]
Trong đó : ρ = OT chính là bán kính quán tính.
Xét
Xét
Mặt khác xét Hình 1-3 ta còn có:
;
Từ đó ta tính được gia tốc hướng tâm:
[1-9]
Khi đó:
[1-10]
Ta có nhận xét về biểu thức [1-10] như sau:
Lực là lực làm xe có xu hướng văng ra khỏi mặt đường nên khi vào quay vòng để xe an toàn thì lực phải nhỏ. Để giảm thì:
+ giảm : tức là giảm tốc độ của xe khi vào quay vòng
+ = Const = 0 tức là khi xe vào quay vòng thì góc quay của hệ thống lái phải từ từ, chỉ thay đổi nhỏ lúc đó ta xem như = Const. ( Người tài xế phải bẽ lái một cách từ từ không được bẽ quá gấp)
Ví dụ : Xác định lực ngang khi xe đi vào đường vòng với tốc độ = 30km/h tại thời điểm t = 0 và t = 2s. Tốc độ quay của hệ thống lái là = 0,05(1/s), thông số của xe là: l = 2,7m; b = 1,3m, G = 1885kgGiải:
= 30km/h = = 0
Với
+ Khi t = 0: = 0
+ Khi t = 2s: = 0,05.2 = 0,1 (1/s)
1.3/ Sự quay vòng của ô tô khi tính đến sự biến dạng của lốp xe:
1.3.1/ Bán kính quay vòng tức thời:
Khi không có sự biến dạng của lốp xe , xe vào cua với vận tốc hợp với phương ngang một góc là vận tốc của cầu trước và cầu sau chuyển động với vận tốc như hình.
Khi có sự biến dạng của lốp xe với.
: góc biến dạng bánh xe cầu trước
: góc biến dạng bánh xe cầu sau
Lúc này phương vận tốc bị lệch một góc thành vận tốc và phương vận tốc bị lệch đi một góc thành vận tốc
Hình 1-4: Mô hình quay vòng khi có sự biến dạng lốp xe
Ta có: ;
Vấn đề đặt ra bây giờ là phải tìm xem = ?
[1-11]
Nhưng vì ; ; rất bé nên:
[1-12]
Khi đó xảy ra 3 trường hợp sau:
TH1: Nếu = tức là áp suất các bánh xe trước bằng áp suất các bánh xe sau.
: Quay vòng đúng
Tức là khi quay vòng không tính đến sự biến dạng hay có tính đến sự biến dạng lốp xe cũng quay vòng với một bán kính quay vòng tức thời (tài xế không thay đổi góc quay vành lái)
TH2: Nếu > tức là áp suất các bánh xe trước nhỏ hơn áp suất các bánh xe sau.
: Quay vòng thiếu
Tức là khi quay vòng có tính đến sự biến dạng của lốp xe tài xế phải quay vành lái cho góc quay vành lái tăng lên so với khi không tính đến sự biến dạng lốp xe, để xe có thể quay vòng đúng với bán kính quay vòng tức thời R.
TH3: Nếu < tức là áp suất các bánh xe trước lớn hơn áp suất các bánh xe sau.
: Quay vòng thừa
Tức là khi quay vòng có tính đến sự biến dạng của lốp xe tài xế phải quay vành lái cho góc quay vành lái giảm đi so với khi không tính đến sự biến dạng lốp xe, để xe có thể quay vòng đúng với bán kính quay vòng tức thời R.
1.3.2/ Xét ảnh hưởng biến dạng của lốp xe:
Phần trên ta nói về 3 TH: ; ; . Trong 3 trường hợp này thì trường hợp không có gì để nói và thực tế nó cũng rất ít khi xảy ra.
1.3.2.1/ Trường hợp quay vòng thiếu: >
...........................................
CHƯƠNG II: ẢNH HƯỞNG CỦA KẾT CẤU Ô TÔ KHI QUAY VÒNG
2.1/Phương trình động học của xe khi quay vòng:
Khi xe vào quay vòng thì yếu tố động học của xe gồm 3 yếu tố sau: vận tốc của xe, quĩ đạo chuyển động của xe và yếu tố thứ 3 là gia tốc hướng tâm.
Ta xét mô hình phẳng của xe như hình bên dưới. Để xét quĩ đạo chuyển động của xe ta sẽ xét đến yếu tố trọng tâm T( ; ) của xe so với hệ tọa độ mặt đường.
Hệ trục tọa độ xTy là hệ trục tọa độ gắn trên khung xe. Hệ tọa độ là hệ tọa độ mặt đường được đưa vào trọng tâm T.
Khi đó phương vectơ vận tốc hợp với khung xe một góc là góc chuyển hướng của ô tô.
Khung xe hợp với mặt đường một góc gọi là góc quay khung xe.
Hình 2-1: Mô hình xác định quĩ đạo tâm xe và vận tốc xe
2.1.1/Phương trình vận tốc :
Xét Hình 2-1: Chiếu lên 2 phương , ta được
[2-1]
[2-2]
2.2.2/Tọa độ trong tâm của xe:
[2-3]
[2-4]
Từ đó ta có thể xác định được tọa độ trọng tâm tại một thời điểm nhất định.
2.2.3/Gia tốc hướng tâm của xe:
Gia tốc hướng tâm xuất hiện khi xe đi vào một quĩ đạo cong. Thông thường ta có thể xác định được như sau:
[2-5]
Trong đó v là vận tốc của xe, là bán kính quay vòng tức thời, thực tế thay đổi liên tục và khó đo đạc trong thực tế.
Nên có một cách khác có thể xác định được .
Từ công thức [2-1]; [2-2] ta có
[2-6]
[2-7]
Xét hình [2-2]:
Được các vectơ theo phương như hình
Hình 2-2: Mô hình xác định gia tốc hướng tâm của xe
Được các vectơ theo phương như hình
Và theo sơ đồ ta dễ dàng xác định được gia tốc hướng tâm
[2-8]
2.2/Phương trình động lực học của xe khi quay vòng:
Hình 2-3: Mô hình động lực học của xe khi quay vòng
Xét mô hình phẳng của xe trên Hình 2-3. Các lực tác dụng lên xe bao gồm:
là lực kéo ở các bánh xe
là lực cản lăn ở các bánh xe
là phản lực bên ở các bánh xe
là mômen cản quay của bánh xe
=1, 2, 3, 4 tùy thuộc vào ta kí hiệu.
Tại trọng tâm T của xe cách cầu trước một đoạn a và cách cầu sau một đoạn b. Chiều dài cơ sở của xe là l = a + b. Tại điểm C cách trọng tâm T một đoạn e có hai lực theo phương x là (lực cản không khí), lực theo phương y là lực gió bên N.
Tại trọng tâm T có các lực tác dụng như sau:
+ Lực quán tính
+ Lực li tâm là trong đó m là khối lượng toàn bộ xe bao gồm cả người
Khi xe quay vòng sẽ xuất hiện mômen quán tính xung quanh trục Tz là . Góc quay của bánh xe dẫn hướng là . Kích thước chiều rộng vết lốp của cầu trước là , của cầu sau là .
Xét Hình 2-3 ta có phương trình cân bằng lực và mômen như sau:
Đối với trục dọc ô tô ( trục x):
[2-9]
Đối với trục ngang ô tô ( trục y):
[2-10]
Phương trình cân bằng mô men đối với trục Tz:
[2-11]
2.3/ Động lực học quay vòng:
Ở phần trên khi xét mô hình phẳng của xe ta đã có được 3 phương trình động lực học của xe [2-9]; [2-10]; [2-11] khi xe quay vòng.
Mục tiêu của phần này là ta sẽ làm mọi cách để đơn giản được hệ ba phương trình trên, làm cho quá trình tính toán về sau sẽ dễ dàng hơn và vì đây còn là hệ cơ sở để ta có thể tính toán các thông số về sau.
Thay vì xét mô hình phẳng bây giờ ta chỉ xét mô hình một vết bánh xe.
Khi đó ta đặt.
Hình 2-4: Mô hình một vết bánh xe
Ở đây để đơn giản ta bỏ qua lực cản lăn và mô men quay ( mômen đàn hồi) vì thực tế giá trị của chúng rất nhỏ có thể bỏ qua được. Từ đó ta có hệ phương trình đơn giản hơn.
[2-12]
[2-13]
[2-14]
Khi xe vào quay vòng để đảm bảo an toàn, người lái phải cua rất từ từ với góc cua rất nhỏ tức là nhỏ và khi càng vào cua thì càng tăng lên nhưng sự tăng lên là nhỏ có thể xem = const .
Góc nhỏ thì góc nhỏ.
; ;
Như vậy ta tiếp tục thu gọn hệ ba phương trình trên [2-12];[2-13];[2-14] được như sau.
[2-15]
[2-16]
[2-17]
Ở đây , là phản lực bên ở cầu trước và cầu sau. Được tính như sau.
[2-18]
[2-19]
Trong đó ; là độ cứng góc lệch bên trung bình của các bánh xe của cầu trước, cầu sau , là góc lệch bên của các bánh xe của cầu trước, cầu sau.
Hình 2-5: Sự thay đổi vết tiếp xúc khi vận tốc và
Ta cần xác định được giá trị , để có thể tính được , . Để xác định được góc lệch bên , ta xét mô hình phẳng động học như hình bên dưới.
- Ở bánh xe cầu trước:
[2-20]
- Ở bánh xe cầu sau:
[2-21]
Hình 2-6: Mô hình xác định góc lệch bên
Từ đây ta có thể tính được:
[2-22]
[2-23]
Ở đây trong biểu thức [2-22] lại xuất hiện đại lượng là góc quay bánh xe. Khi vào quay vòng tài xế sẽ quay vành lái một góc khi đó trụ quay đứng sẽ quay một góc . Trụ quay đứng quay một góc làm cho bánh xe dẫn hướng quay một góc .
Khi đó ta có:
[2-24]
Mômen quay vành lái:
[2-25]
Trong đó là tỉ số truyền từ trụ đứng đến trụ quay đứng.
Công thức xác định mối quan hệ giữa và là
[2-26]
Trong đó: , , là các hệ số phụ thuộc vào kết cấu xe đã có sẵn. là độ cứng của hệ thống lái nếu hệ thống lái có độ cứng cao thì lớn ngược lại nếu độ cứng thấp thì nhỏ.
: khoảng dịch chuyển trước của đường tâm trụ đứng.
: khoảng dịch chuyển sau của đường tâm phản lực bên.
Từ [2-26]: [2-27]
Lúc này :
[2-28]
[2-29]
Ta đặt : [2-30]
[2-31]
Chú ý: Ở đây ta đặt với ý nghĩa như sau. Các thông số , , là thông số kết cấu của xe nên không thay đổi. Còn là độ cứng của hệ thống lái. Trên xe hệ thống lái là một hệ thống đàn hồi vậy sẽ thay đổi. Nhưng nhìn vào [2-30] dù có thay đổi thì cũng làm giảm dẫn đến giảm tức là giảm lực bên tác dụng lên các bánh xe cầu trước.
Vậy tóm lại ta có các phương trình động lực học [2-15]; [2-16]; [2-17]; [2-23] ;[2-31] như sau:
2.4/ Động lực học quay vòng đều:
Khi quay vòng đều ô tô sẽ chuyển động trên quĩ đạo cong có bán kính R không thay đổi ( R = Const). Nếu lực ly tâm tăng lên quá lớn khi quay vòng thì các bánh xe chuyển động ở giới hạn trượt bên và có thể làm mất quĩ đạo chuyển động.
Trong thực nghiệm khi quay vòng để an toàn xe sẽ chuyển động với v = Const và thay đổi bán kính R để được các gia tốc hướng tâm khác nhau.
Nếu quay vòng đều với v = const, R = const thì góc chuyển hướng và vận tốc góc khung xe cũng không đổi. Điều đó đồng nghĩa với việc:
v = Const; R= Const
; ;
Ta bỏ qua sự ảnh hưởng của gió vì vậy ta có thể tiếp tục thu gọn các phương trình
[2-15];[2-16];[2-17].
[2-32]
[2-33]
[2-34]
Ta đã tìm ra được giá trị ; nên thay vào hệ ba phương trình [2-32],[2-33],[2-34]. Được hệ phương trình như sau.
[2-35]
[2-36]
Cuối cùng ta được hệ gồm hai phương trình [2-35], [2-26] là phương trình động lực học quay vòng đều của xe.
CHƯƠNG III : HÀM TRUYỀN KHI XE QUAY VÒNG
3.1/ Khái niệm:
Khi xe vào quay vòng đòi hỏi tài xế phải tác động lên vành lái để thay đổi góc quay vành lái dẫn tới làm thay đổi góc quay bánh xe dẫn hướng và mục đích cuối cùng là làm cho xe quay vòng một cách an toàn, ổn định nhất.
Vậy dễ thấy ngay yếu tố để làm cho xe quay vòng được là (góc quay vành lái) đó chính là thông số đầu vào, sau đó khung xe sẽ chuyển động trên một quĩ đạo mà đặc trưng có các thông số : là góc lệch hướng chuyển động (góc chuyển hướng), là vận tốc góc quay thân xe và yếu tố cuối cùng đánh giá tính ổn định khi quay vòng là (gia tốc hướng tâm).
Định nghĩa hàm truyền ra đời với mục đích là tìm được mối quan hệ của thông số đầu vào là với các thông số đầu ra là , , . Tức là ta xác định được các phản ứng của ô tô trước sự thay đổi của góc quay vành lái.
Qui ước viết gọn hàm truyền như sau:
: Hàm truyền vận tốc góc quay thân xe
: Hàm truyền góc lệch hướng chuyển động
: Hàm truyền gia tốc hướng tâm.
..................................................
CHƯƠNG VII: KẾT LUẬN VÀ KIẾN NGHỊ
7.1/ Kết luận:
Khi ô tô chạy trên đường hoặc vào quay vòng thì có rất nhiều yếu tố tác động vào chiếc xe bao gồm các yếu tố khách quan bên ngoài như gió, chất lượng mặt đường, các yếu tố bất ngờ… và các yếu tố chủ quan bao gồm như: thái độ nghiêm túc cẩn trọng của tài xế trong việc điều khiển xe, nhưng quan trọng nhất vẫn là kết cấu của chiếc xe mà chúng ta tin tưởng khi chọn nó làm phương tiện tham gia giao thông trên đường. Tổng hợp lại thì có 3 yếu tố chính quyết định sự an toàn, ổn định của chiếc xe khi tham gia giao thông là : Sự biến dạng của lốp xe, kết cấu của ô tô và ảnh hưởng của lực gió tác dụng vào xe.
Đối với chiếc xe bus SAMCO - BG4W mà ta đang xét thì tính ổn định không cao, hay nói một cách đúng hơn là không ổn định. Bởi vì kết cấu của xe có trọng tâm lệch về phía gần cầu sau hơn (b = 1,437m; a= 2,738m) làm cho xe có xu hướng quay vòng thừa khi xe vào quay vòng, điều này rất nguy hiểm có thể gây mất điều khiển khi vào quay vòng, và nếu như vận tốc vào quay vòng lớn đạt vận tốc ngưỡng là =11,89m/s = 42,8 km/h thì xe rất dễ bị lệch khỏi quĩ đạo chuyển động nên rất nguy hiểm.
Chính vì kết cấu của xe như vậy mà khi chịu sự tác động của gió thì tâm của gió bên có xu hướng lệch về phía sau trọng tâm hướng về phía cầu sau, điều đó đồng nghĩa với việc khi có gió bên thì xe có xu hướng bị quay ngược lại so với chiều tác động của gió gây mất lái, không ổn định.
7.2/ Kiến nghị:
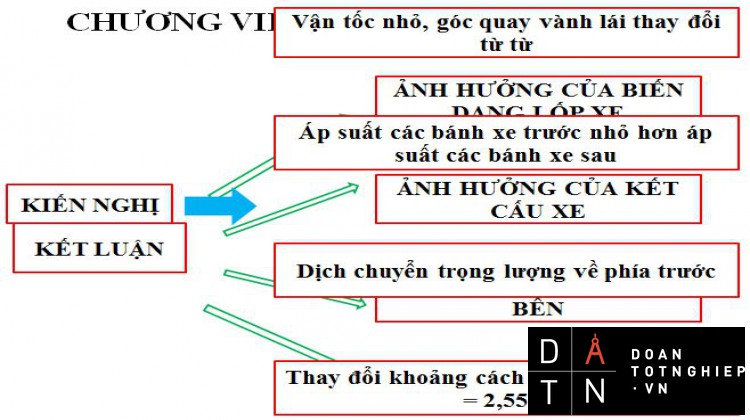
Khi vào quay vòng phải giảm vận tốc xuống một cách từ từ và sự thay đổi góc quay vành lái phải nhỏ và từ từ. Để đảm bảo quay vòng được an toàn, xe không bị lệch khỏi quĩ đạo chuyển động.
Bơm các bánh xe trước có áp suất nhỏ hơn áp suất các bánh xe sau để đảm bảo xe được quay vòng thiếu khi vào quay vòng (áp suất bánh xe trước khoảng 6,5KG/cm2, áp suất bánh xe sau khoảng 5KG/cm2 ) điều này sẽ an toàn và ổn định khi vào quay vòng.
Chính vì kết cấu của xe bus SAMCO - BG4W không ổn định vì vậy khi vào quay vòng phải đi với vận tốc nhỏ nếu vận tốc quay vòng lớn sẽ bị mất lái ngay lập tức và điều này rất nguy hiểm.
Qua quá trình nghiên cứu và tính toán chúng tôi đưa ra một đề nghị về sự thay đổi kết cấu của ô tô để xe được ổn định và an toàn hơn khi hoạt động trên đường. Đó là thay đổi sự phân bố trọng lượng trên 2 cầu xe sao cho trọng tâm của ô tô thay đổi với thông số b = 2,55m; a=1,625m. Để làm được điều này đối với những chiếc xe bus SAMCO - BG4W đang hoạt động thì khi chở khách nên cho phần lớn khách dịch chuyển về phía trước để tăng trọng lượng tác động lên cầu trước. Đối với những chiếc xe chuẩn bị xuất xưởng nên phân bố trọng lượng tác động lên 2 cầu để có được khoảng cách tâm như trên. Với sự đề nghị trên sẽ đảm bảo trọng tâm xe sẽ lệch về phía cầu trước và sẽ xe quay vòng thiếu khi vào quay vòng. Đảm bảo xe được ổn định và an toàn. Trong sự đề nghị này qua tính toán chúng tôi đã tính được là tâm của gió bên có xu hướng lệch về phía trước trọng tâm về phía cầu trước với khoảng cách , điều này có nghĩa là nếu tâm gió bên có khoảng cách e này thì xe sẽ an toàn vì lúc này góc bù vành lái còn nếu tâm áp lực không phải là khoảng cách e thì khi có sự tác động của gió xe có xu hướng bị lệch quĩ đạo chuyển động theo chiều gió nên tài xế có thể chủ động bẻ ngược vành lái lại, đảm bảo xe được an toàn khi có gió tác động lên.
TÀI LIỆU THAM KHẢO
1. PGS-TS Nguyễn Văn Phụng. Tính Điều Khiển Và Qũi Đạo Chuyển Động Của Ôtô. Nhà xuất bản Đại Học Quốc Gia TPHCM, 2009.
2. PGS-TS Nguyễn Văn Phụng. Lý Thuyết Ôtô. Nhà xuất bản Đại Học Công Nghiệp TPHCM, 2009.
3. PGS-TS Nguyễn Văn Phụng. Tính Toán Và Thiết Kế Ôtô. Nhà xuất bản Đại Học Công Nghiệp TPHCM, 2009.